Car physics - part 2
Read Car Physics - part 1
In the first part of this series we covered the basic physics about a car moving in a straight line. In this article we will continue out journey and start connecting the car components with the forces they generate.
Engine
In this article we are going to give life to the 'EngineForce' variable we introduced in the previous chapter. The power delivered by the engine is not constant. It depends on the engine speed, the number of revolution per minute. If we want to be precise, and in our case we have to, an engine produces 'torque'. In physics torque is the tendency of a force to rotate an object about an axis. This physical entity is the cross product of the force and the distance it is applied at.
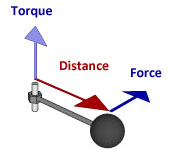
t = d * F (1)
Torque is expressed in Nm (Newton meters) d is the distance in meters and F the force in Newtons.
Using torque is more convenient because we can easily derive the force applied to the road surface which is actually pushing the car. There is a close relation between power the output and the torque of an engine. We usually talk about the horsepower of an engine and forget all about torque. In physics these two are tied together and their relationship is described by the formula
P = t * Ο‰ (2)
Where P is the power in watts, t is the torque in Nm at a given engine speed and, Ο‰ is the engine speed in rad/sec.
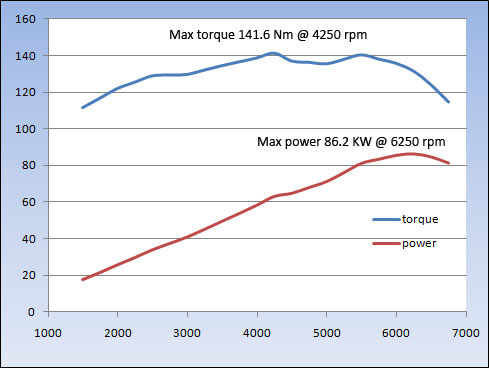
A torque and power diagram looks like this
If we know the amount of torque that reaches the drive wheels and their diameter we can derive the force that propels the car. Solving equation (1) for force gives us
F = t / d (3)
where d is the radius of the wheel. Assuming that we have infinite traction and no wheel spin this is the force that makes the car move.
Transmission
How much torque is actually reaching down to the wheels? Well this depends on the selected gear in the gearbox and the current speed. Although it may sound confusing it is simple once you understand what the gearbox does. This is not an engineering course so we don't care about how it works but only what it does.
The gearbox is a mechanism that is used to convert speed and torque from a rotating power source such as the engine. When two gears are meshing together they transmit power. From equation (2) above we can deduce that since energy is conserved the torque of each gear depends on its rotational speed. When they have uneven number of teeth they can be used either to increase the force or the speed. A gearbox is a mechanism which consists of several pairs of gears which can be selected either automatically or manually depending on the situation and the driver's desire. This feature of torque and speed conversion is that makes gearboxes so useful in automotive industry. The higher the gear the higher the rotation speed but the lower the torque at the other end.
The next part of the transmission is the differential. This splits the rotation movement and torque to the two driving wheels. Another speed reduction takes place inside the differential. To keep things simple at the moment we will ignore the other mechanical characteristics of the differential and assume that it splits the torque in half.
The final drive ratio in each gear is the product of that of each gear in the gearbox multiplied by the gear ratio in the differential. A typical gar box with 5 speeds is shown in the table
| 1st gear | 3.909 |
| 2nd gear | 2.238 |
| 3rd gear | 1.520 |
| 4th gear | 1.156 |
| 5th gear | 0.971 |
The differential ratio being 3.562 makes the final drive ratio for each gear
| 1st gear | 13.924 |
| 2nd gear | 7.972 |
| 3rd gear | 5.414 |
| 4th gear | 4.118 |
| 5th gear | 3.459 |
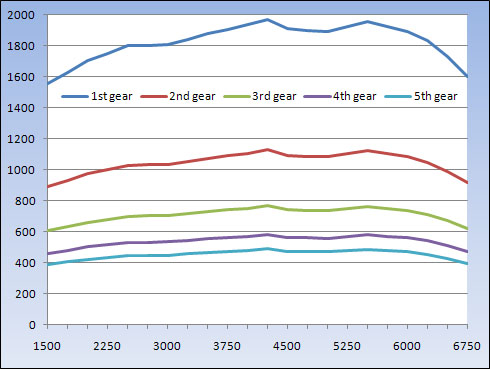
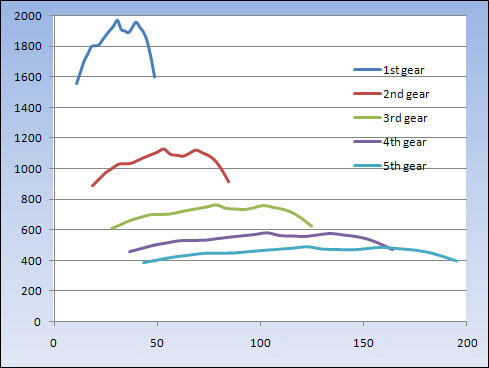
From the values in the second table we understand that the lower the gear the higher the available torque at the drive wheels. The following diagrams show the amount of torque each gear gives against the engine speed and the car speed we can reach with each gear. You will notice that the first gear is the strongest but the fifth is the fastest. This means that in first gear the acceleration is faster but we can reach the top speed in fifth. The data given in the table and the graphs are based on a real car.
Now that we have seen what the engine force is it's time to see how this affects the kinetic state of the car. In the example car above about 15% of the energy produced by the engine is 'lost' in the transmission and other systems of the car. So if we want to be accurate the final torque (remember that these two can are bond together) is 85% of what we have in the diagrams. The final force that pulls the car is the torque divided by the wheel radius.
F = e * t / r (4)
Where F is the force, e is the efficiency (85% in out case), t is the engine torque and r is the wheel radius. So are we done? Not yet. We have to take the throttle position into account. The torque we see in the diagram is the maximum torque available at a given rpm. The actual amount of torque is controlled by the driver and how hard he steps on the accelerator pedal. This ranges from fully closed (0) to fully open (1). So the equation becomes
F = ap * e * t / r (5)
Where ap is the value representing the accelerator pedal depression.